Scale Invariance
Harris Detector is invariant under changes involving rotation and intensity, but they are not invariant under scaling.
Solution:
- Design a function on the region (circle), which is "scale invariant" - not affected by the size but will be the same for "corresponding regions"
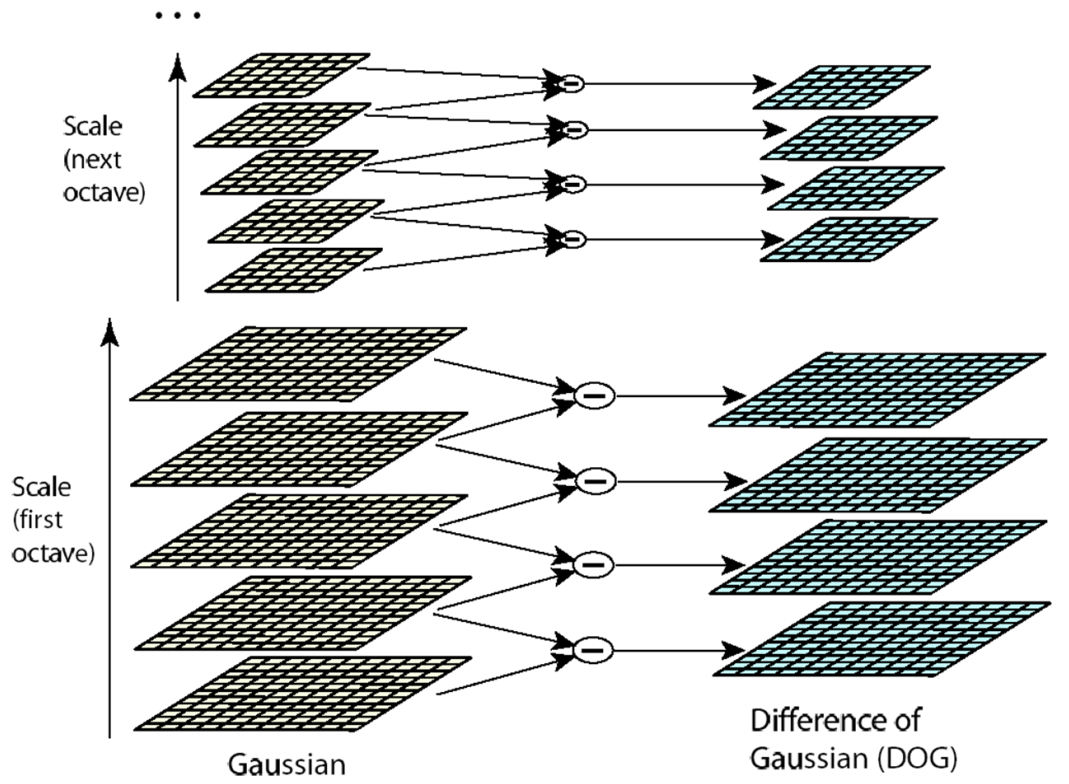
SIFT Detector
SIFT: Scale Invariant Feature Transform
General Idea
Find robust extreme (maximum or minimum) both in space and scale.
Use DoG (Difference of Gaussian) pyramid (Laplacian Pyramid) to find maximum values, then eliminate “edges” and pick only corners.
Key Point Localization
Each point is compared to its 8 neighbors in the current image and 9 neighbors each in the scales above and below
Harris-Laplace Detector
Harris-Laplace Detector combines the difference of Gaussians with the Harris Detector: we find the local maximum of the Harris corner in space and the Laplacian in scale.